Rev-B vs Rev-C scope. Below is the intended
dual-beam algorithm. Rev-B firmware implements steps 1–6; Phase 2
(step 7) is a Rev-C target. The
V_CAL_K = 1.27 scalar applied after Step 6
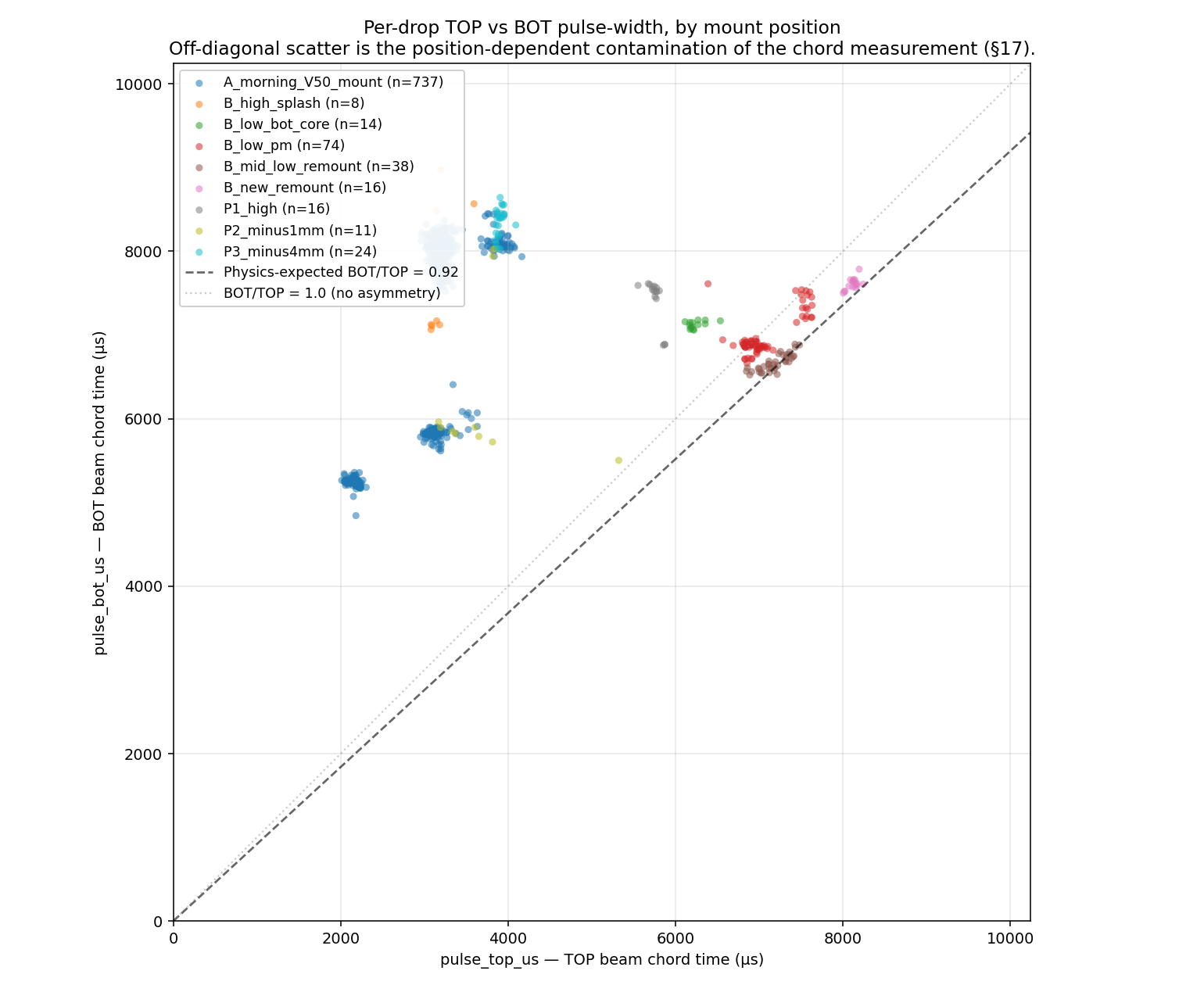
corrects the systematic chord-sphere under-prediction surfaced in
bench validation — see
Limitations §17 for the residual error
sources and position-dependence ceiling.
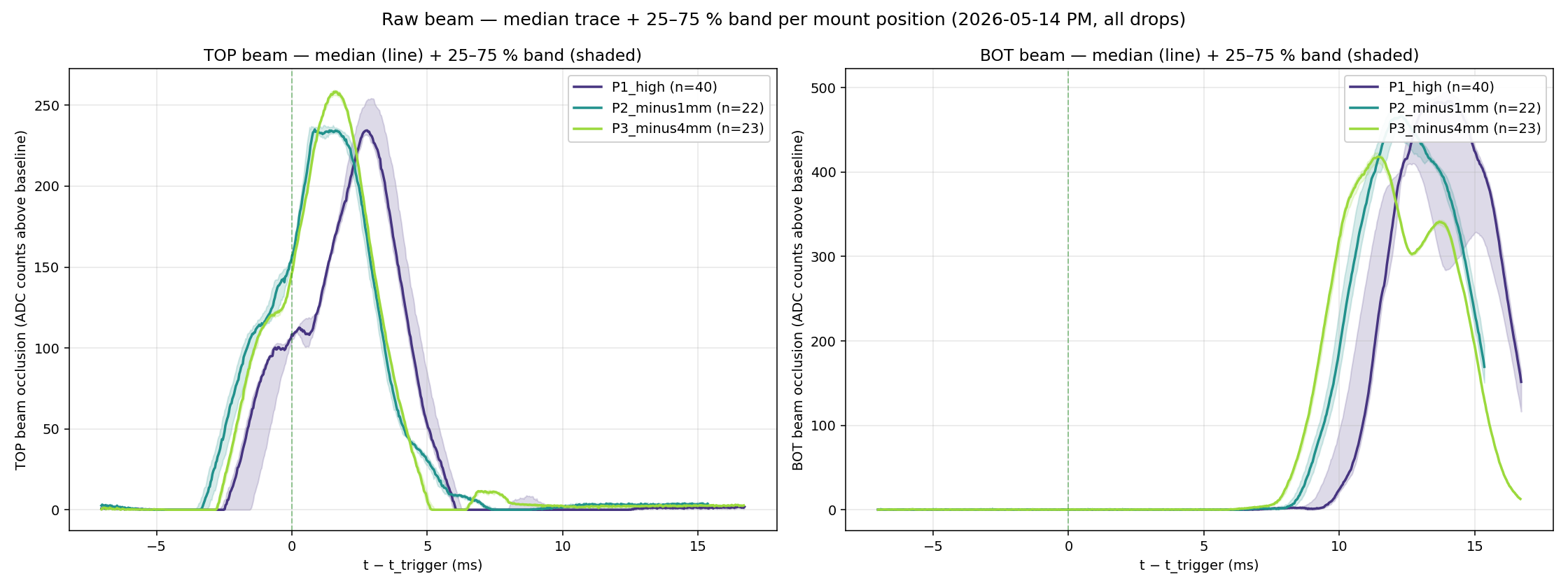
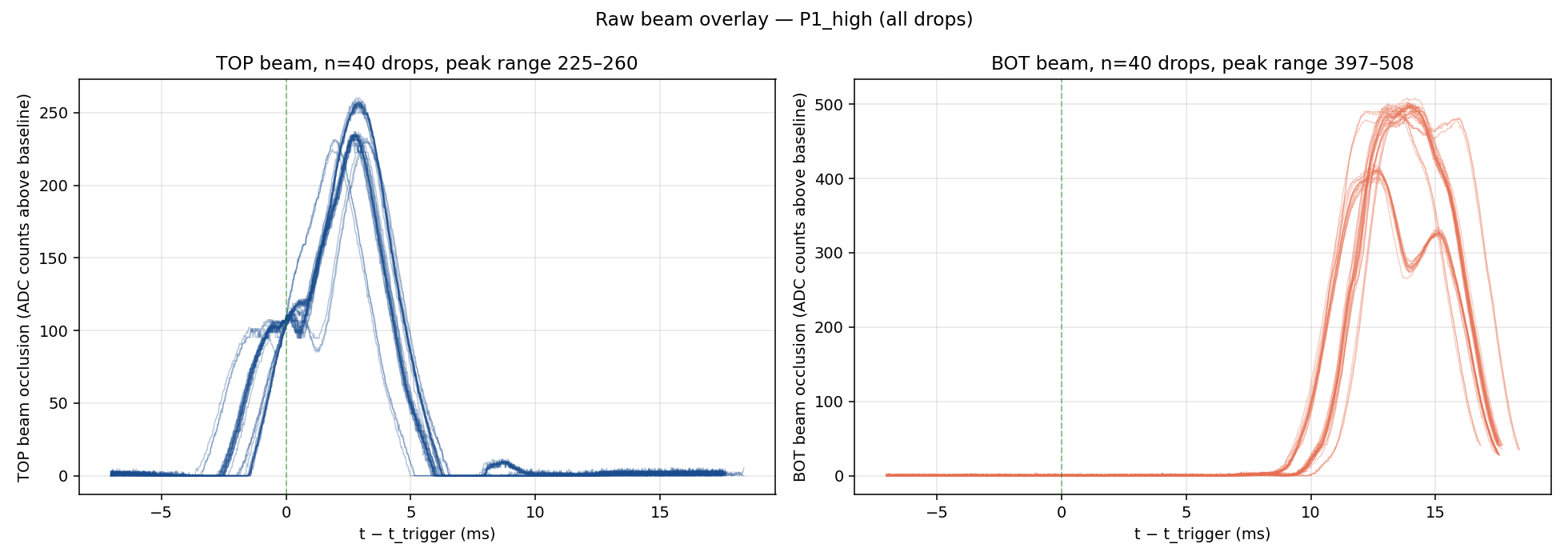
Phase 1 runs both IR beams simultaneously for the first ~10 drops of a
session. Each drop emits two falling/rising edge pairs at the
comparator, giving four timestamps per drop:
tT,in — leading edge enters TOP beam (falling edge)
tT,out — trailing edge exits TOP beam (rising edge)
tB,in — leading edge enters BOT beam (falling edge)
tB,out — trailing edge exits BOT beam (rising edge)
1. Inter-beam transit. Falling-edge to falling-edge:
Δt = tB,in − tT,in
2. TOP-beam shadow duration. The leading edge enters then the trailing edge exits:
τTOP = tT,out − tT,in
3. Gravity-corrected velocity. The drop accelerates over the
10 mm beam pitch, so a naive v = L/Δt would
overestimate the velocity at the TOP beam. Treat the drop in free fall and
solve L = vTOP·Δt +
½gΔt2 for vTOP:
vTOP = L⁄Δt − ½ g · Δt
At Δt = 19.4 ms (typical for a macro-20 set), the gravity correction
is ~0.10 m·s⁻¹ — a 22 % adjustment that's worth doing. vBOT
= vTOP + g·Δt follows for free if needed.
4. Drop diameter from the TOP-beam shadow.
d = vTOP · τTOP
Using τTOP rather than τBOT locks
the diameter in from the drop's first beam crossing (lower noise floor —
the LED current is steadier earlier in the comparator-armed window).
5. Per-drop volume from the sphere model.
Vi = (4⁄3)π · (d⁄2)3
6. Trimmed-mean calibration. After ten drops, sort the
ten Vi samples ascending, discard the
smallest and largest (protects against one bad drop — bubble, gross
misalignment, ringing), and average the middle eight:
Vcal = (1⁄8) · Σi=29 V(i)
7. Phase 2 — count, don't measure (Rev-C target).
The Rev-C design has the MCU sleep in Stop mode between drops; LPTIM1
pulses the IR LED at 5 µs ON / 1.8 ms (~0.3 % duty), and COMP1 wakes
the core only when the LED is lit AND a drop is in the beam. Each
wake counts as one drop event. Flow rate displayed to the clinician
is the running rolling sum:
Q = (drops in window) · Vcal ⁄ window
Why this works (in principle). The dual-beam
architecture finds the per-session constant Vcal
in ten drops; once found, Phase 2 reduces to counting. Bench
validation showed that in practice the ratio
K = Vtrue ⁄ Vest
spans 0.42–1.98 across mount positions — the position-dependence
finding (Limitations §17) is the live
ceiling on this approach.